Search and Rescue Robot
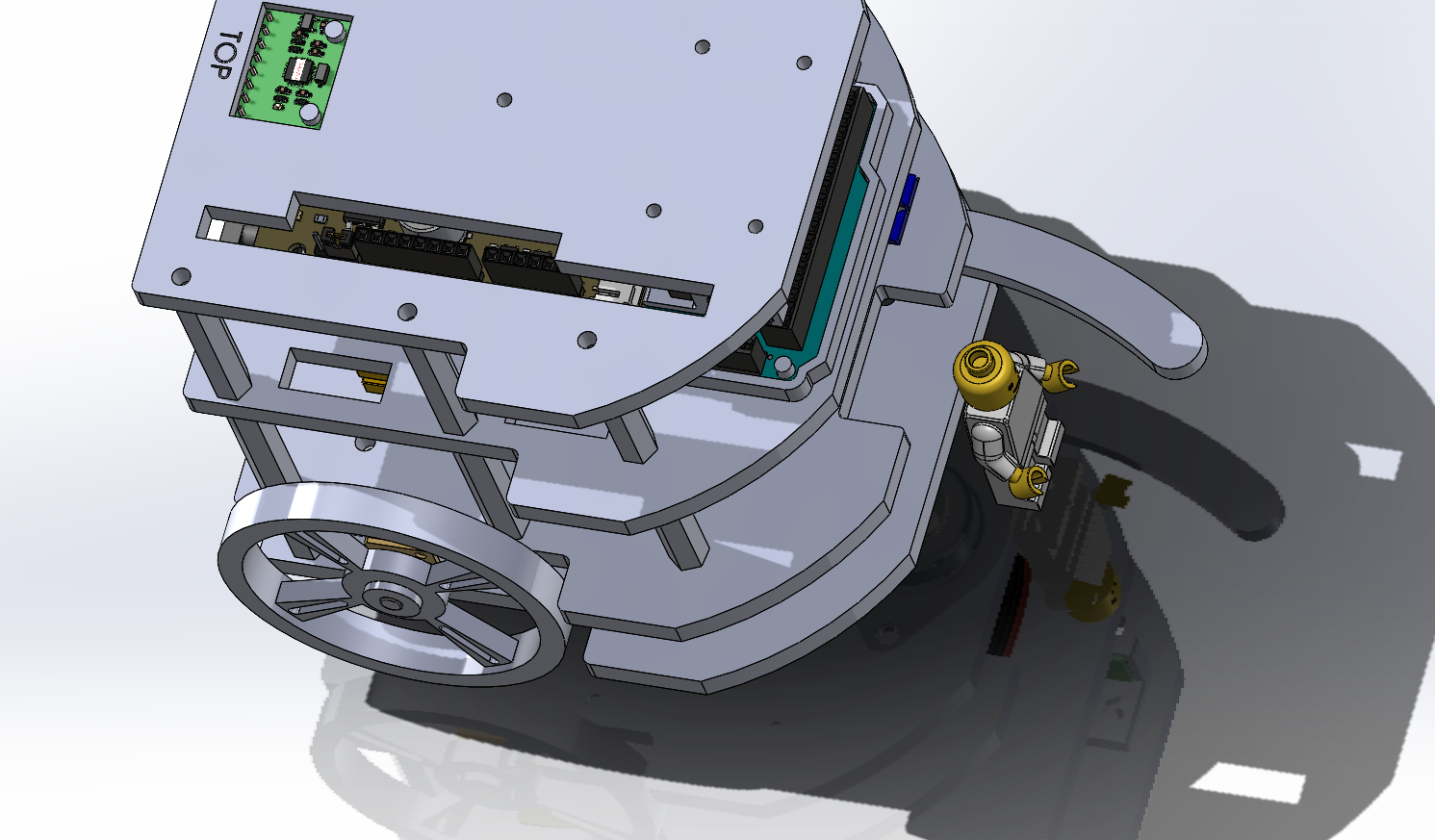
The Search and Rescue Robot (SARbot) is a semi-autonomous robot created as part of a final year course in mechatronics Design
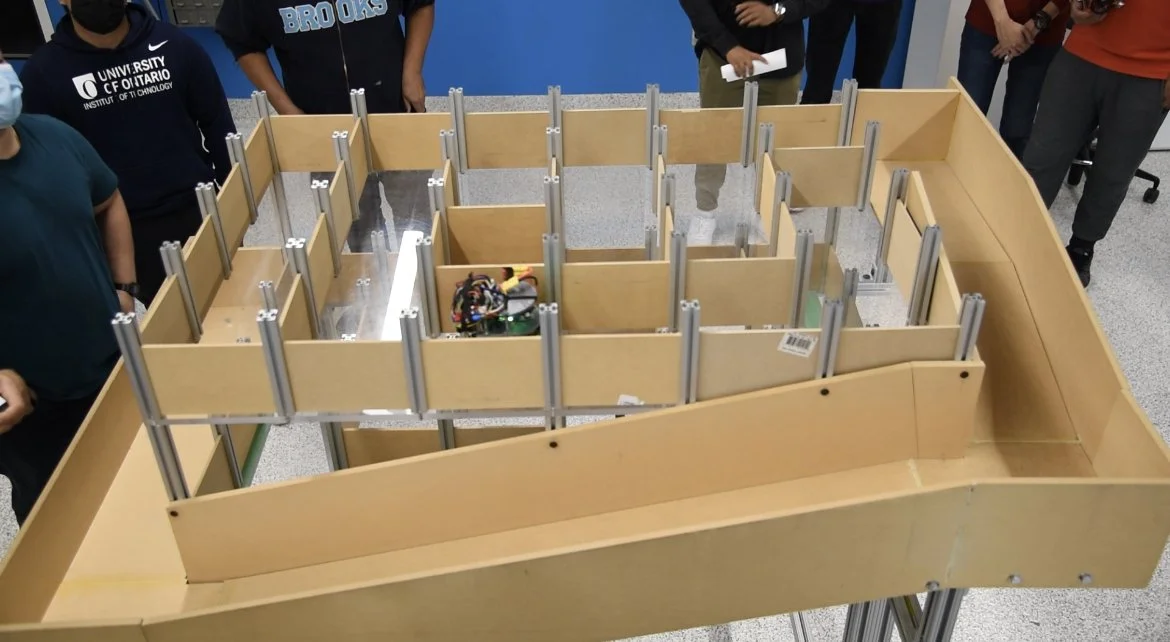

The objective of the course project was to design and build an autonomous search and rescue robot that navigated a mine of a known layout. Simultaneously, during navigation, the SARbot must be able to successfully locate and secure a trapped miner given, its location.
The course project was divided into three phases:
Phase A: Given the location of the miner, the SARbot must navigate the maze and locate and secure the miner.
Phase B: The SARbot must complete Phase A again but retrieve the miner by returning to the start point of the maze.
Phase C: The SARbot must complete Phase A and Phase B again but with unknown obstacles randomly placed in the maze.
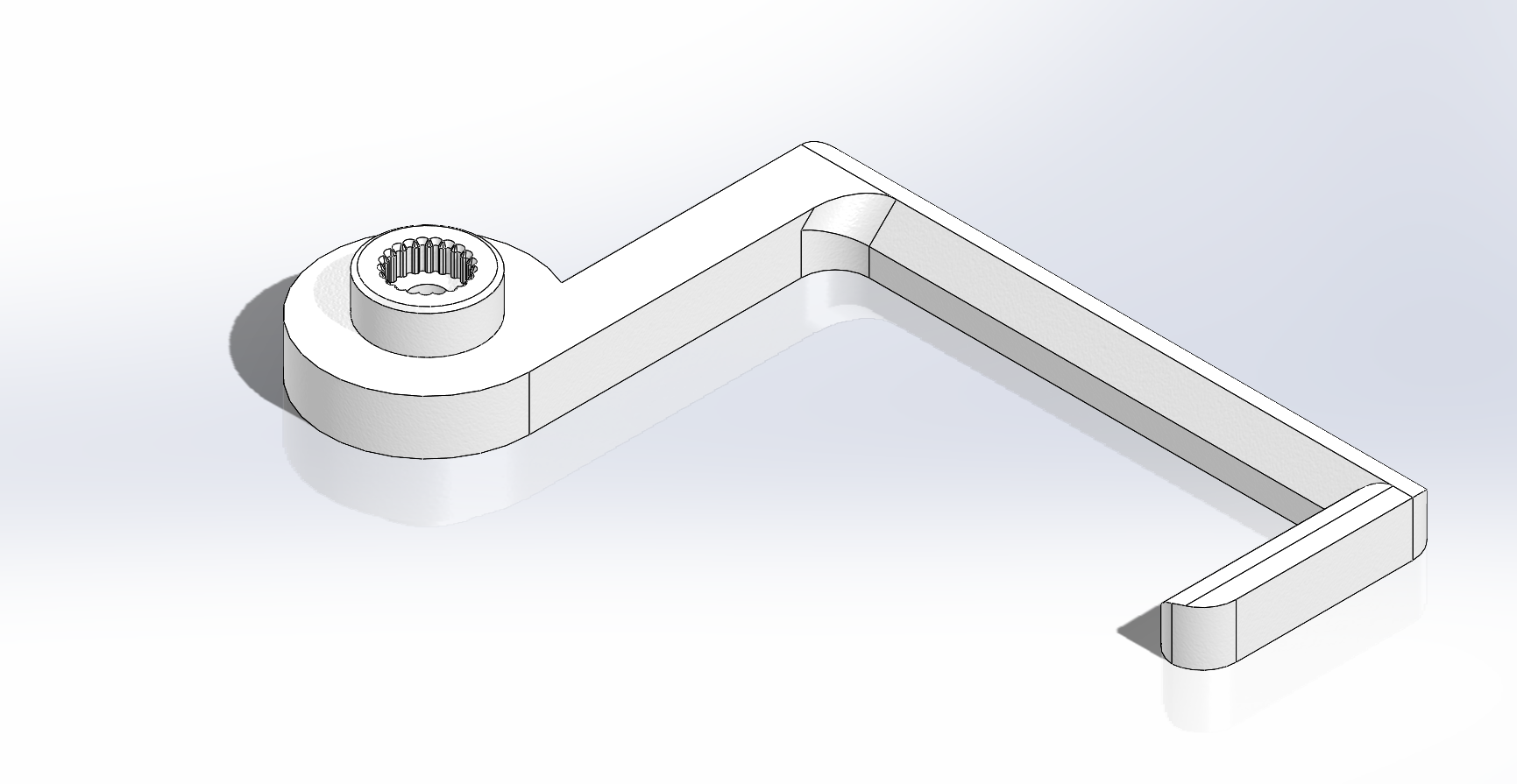
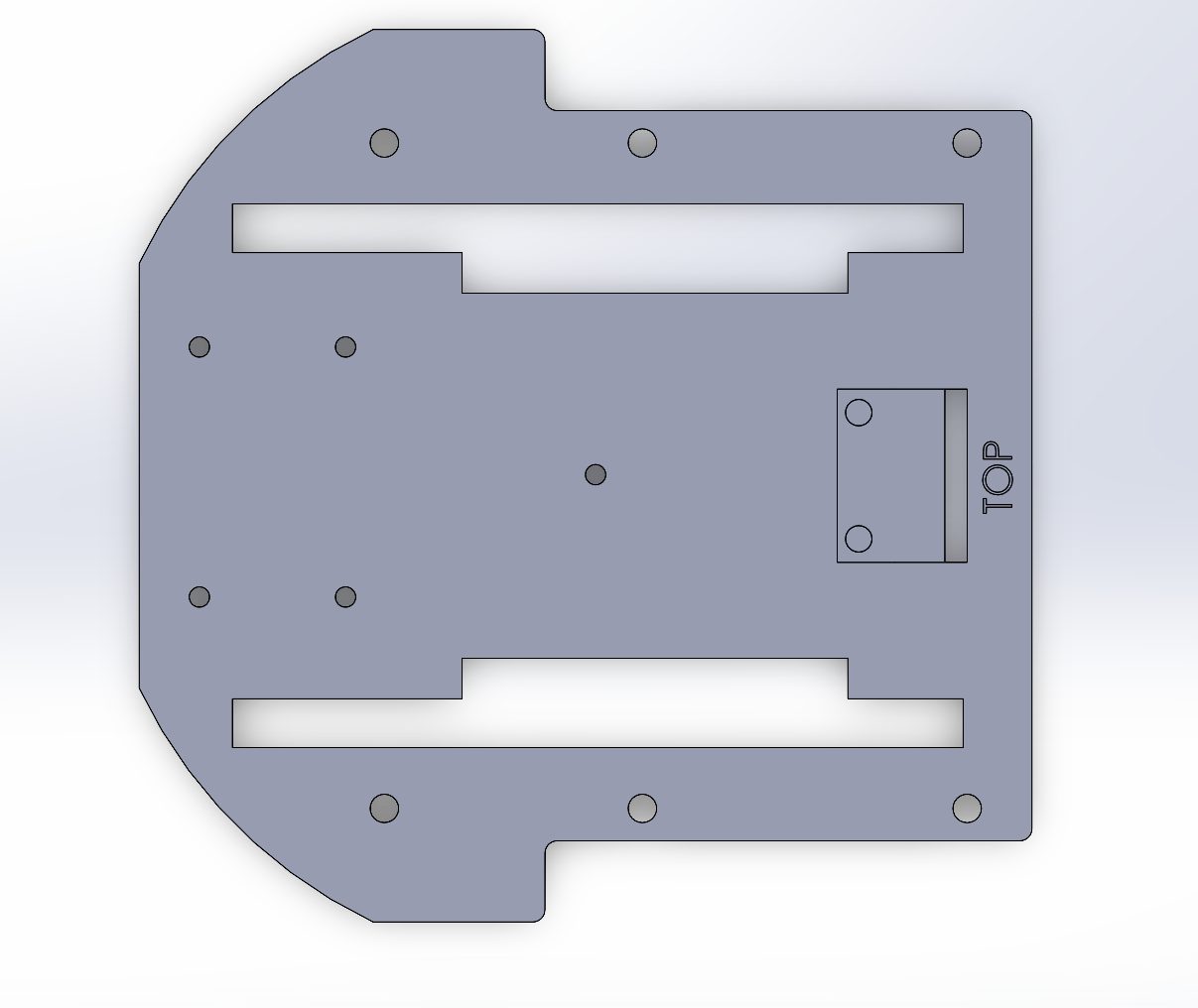
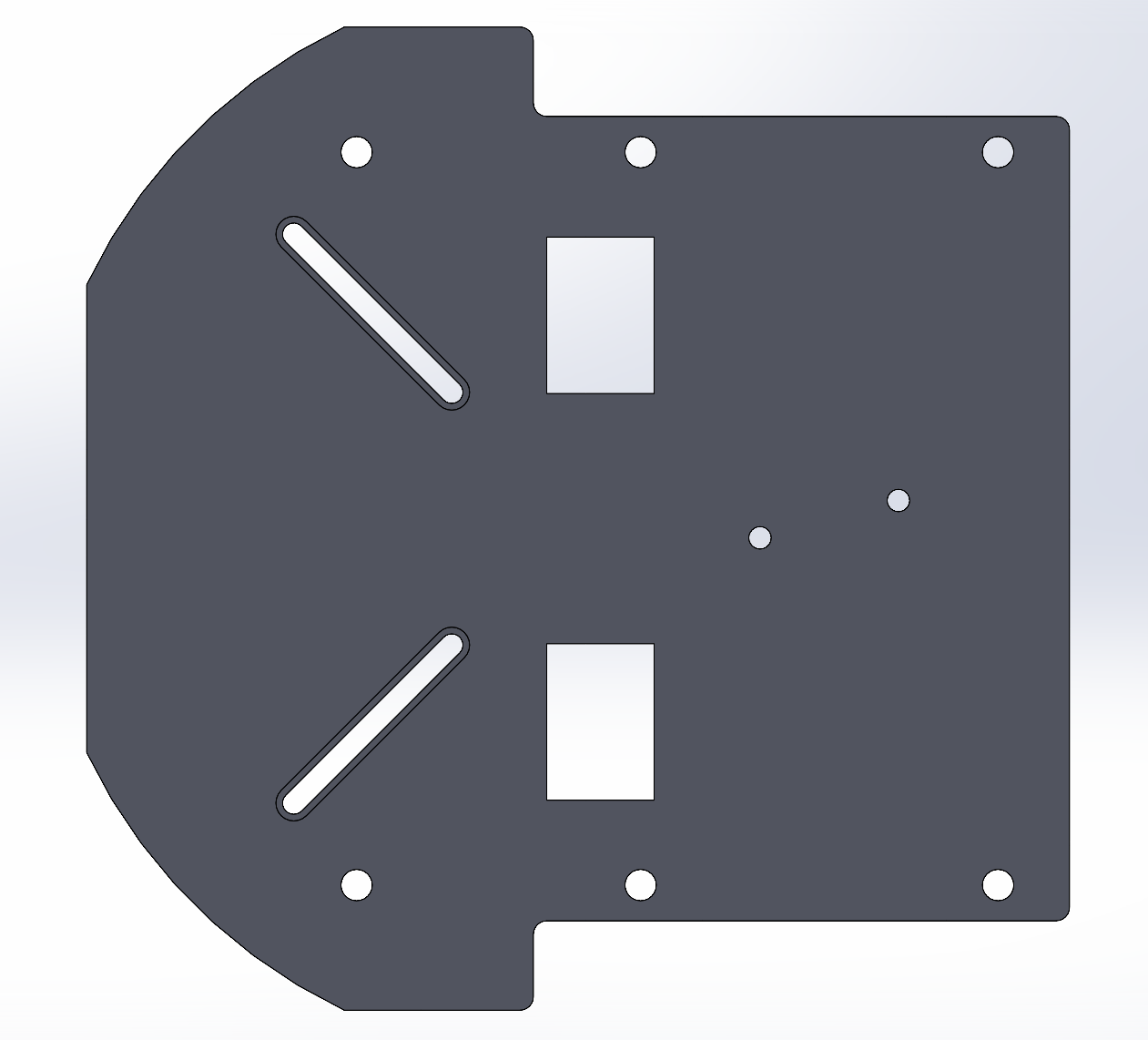
Preliminary design sketches of the SARbot can be viewed below.
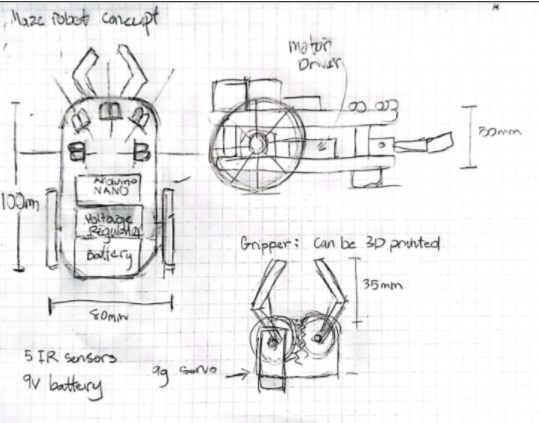

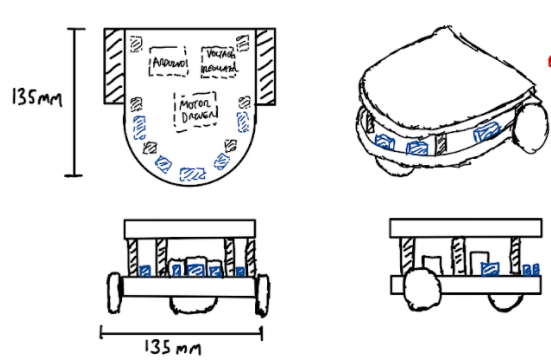
SARbot Design Iterations
-
![]()
Phase A
-
![]()
Phase B
-
![]()
Phase C