Mobile Robot Test Bench

ROS is an open-source tool that is used by academic researchers, companies, and robotics enthusiasts to provide a software platform with “packages” that can be individually developed and reused.
My main interest in the ROS framework was to learn how to use it in future robotic projects as my free time is always spent learning about different applications of robotics.
My two goals for this project were to create a modular platform out of aluminum extrusion, for the opportunity to add new components, and to use it as a learning tool for ROS development.
Initial test bench for mobile robotics

The robot chassis and motors from my NVIDIA Autonomous Rover project were reused initially to test sensors connected to an Arduino Uno. I quickly realized that a small computer like a Jetson Nano would not be able to fit on this chassis. A USB cable would also need to be tethered to the Arduino which also greatly limited the mobility and usability of this robot.
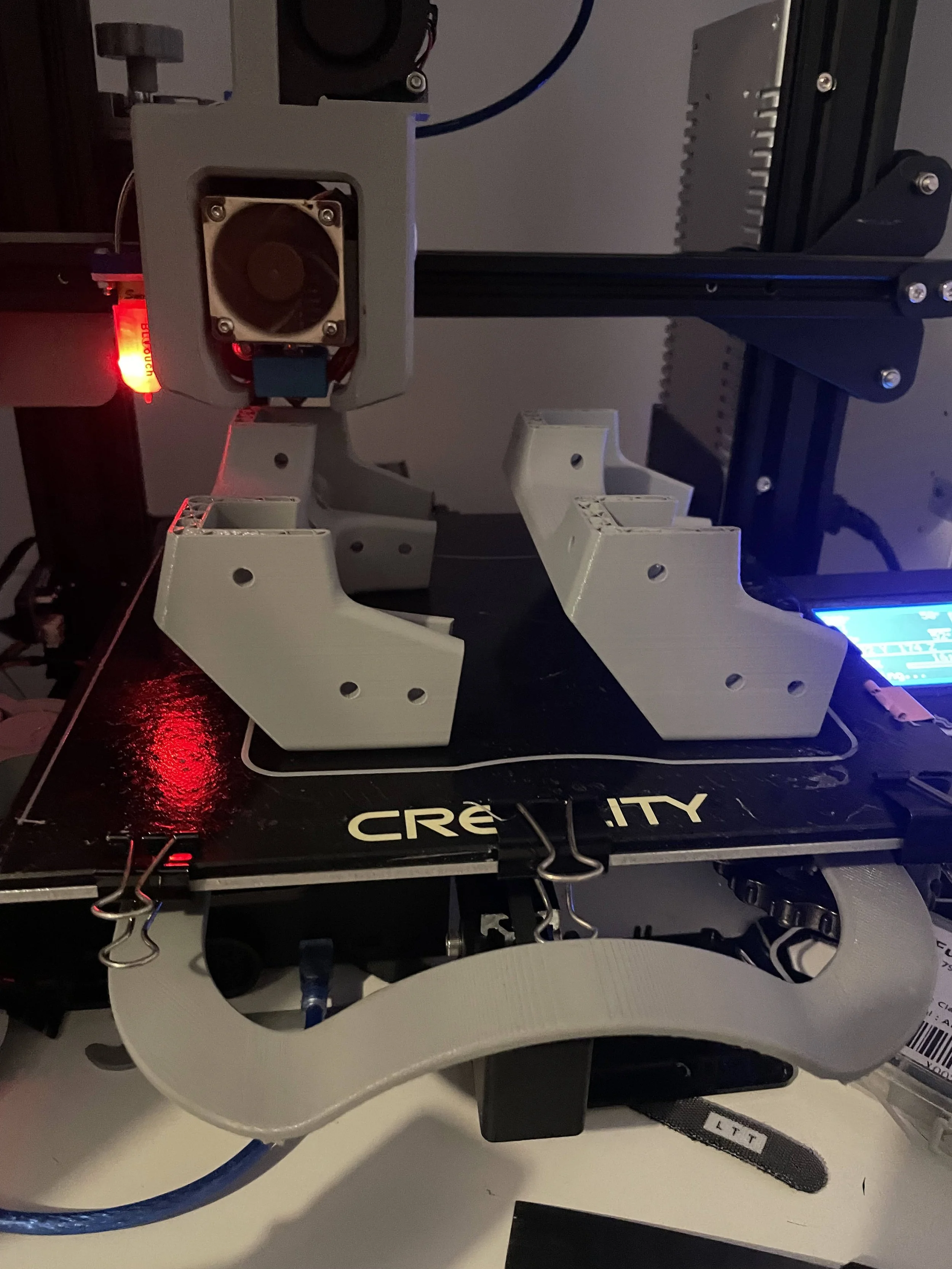
The robot design was modeled in Solidworks to verify the design and material choices. To mount the electrical components and motors to the chassis, an Ultra High Molecular Weight Polyethylene sheet was used for the bottom plate of the robot.
Voltage regulators are used to step down a 14.8V, 6000 mAH battery. This is then used to power the Arduino Uno, Jetson Nano, and supply voltage to the motor driver. For safety, a main battery disconnect is used to cut power from the battery to the rest of the robot. The E-stop when engaged, interrupts the power to the motor driver. To avoid over-draining the lipo battery, a voltage divider is used to scale the battery’s total voltage for the Arduino to read. If this voltage reaches a certain threshold, it will trigger a relay to disconnect the battery automatically.

Keyboard teleoperation of the robot by remoting into the Jetson Nano.
Currently, the robot is being used to test out code for my final year capstone at OTU. This project is supervised by Dr. Ahmad Barari and has the objective of creating a mobile robot that facilitates the disinfection and prevention of airborne diseases.
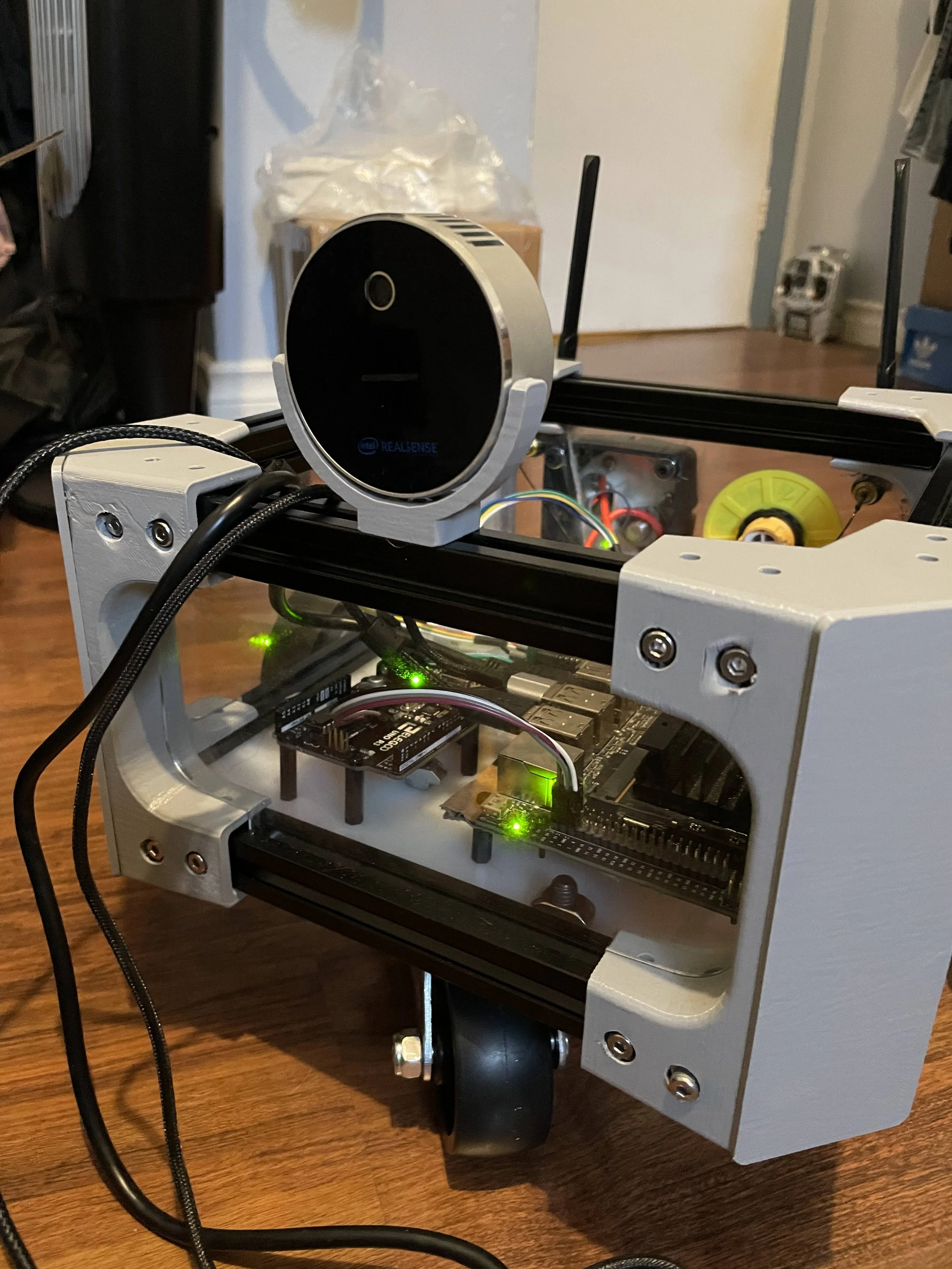
An Intel Realsense L515 camera mounted to the test bench.